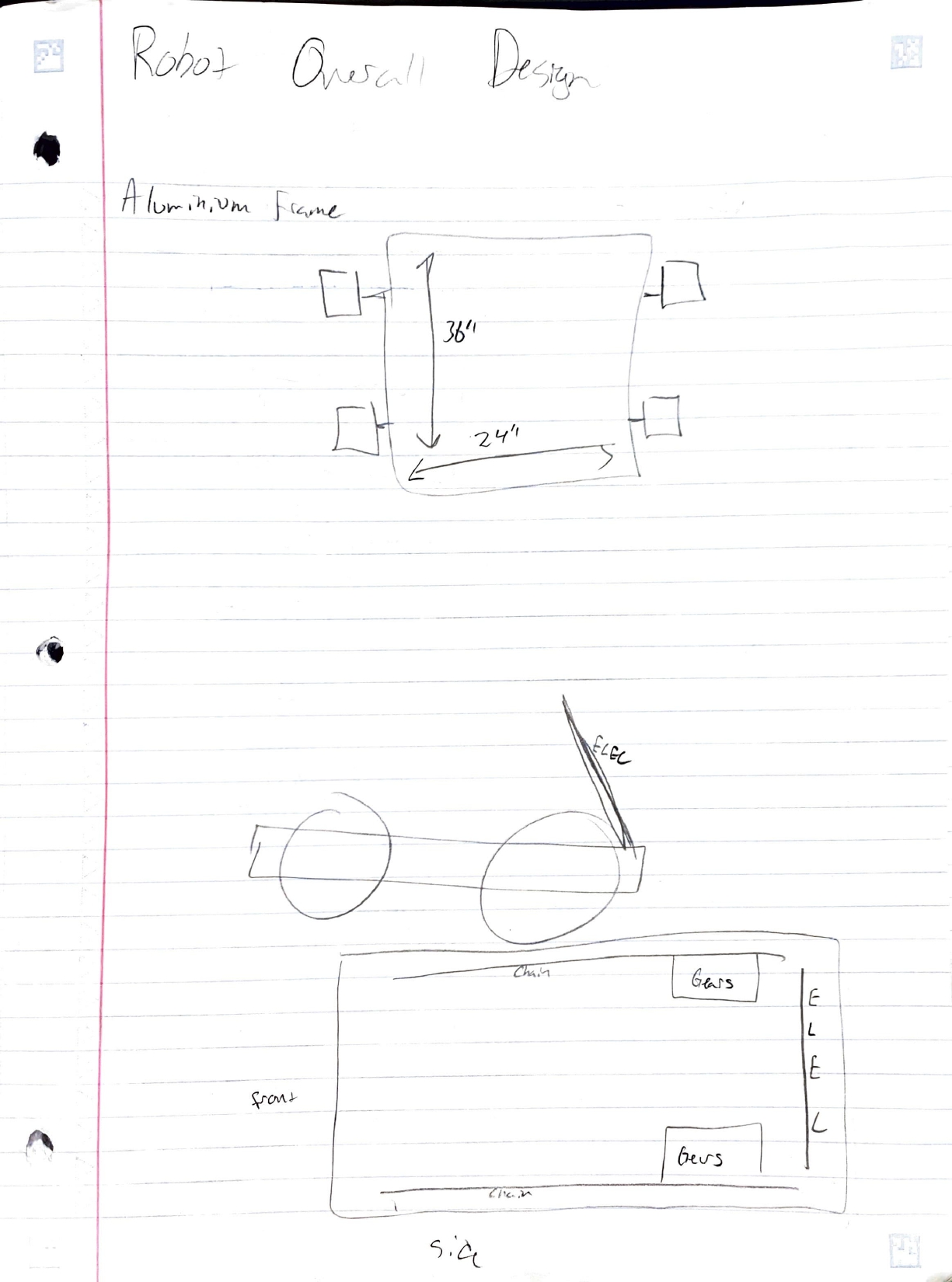
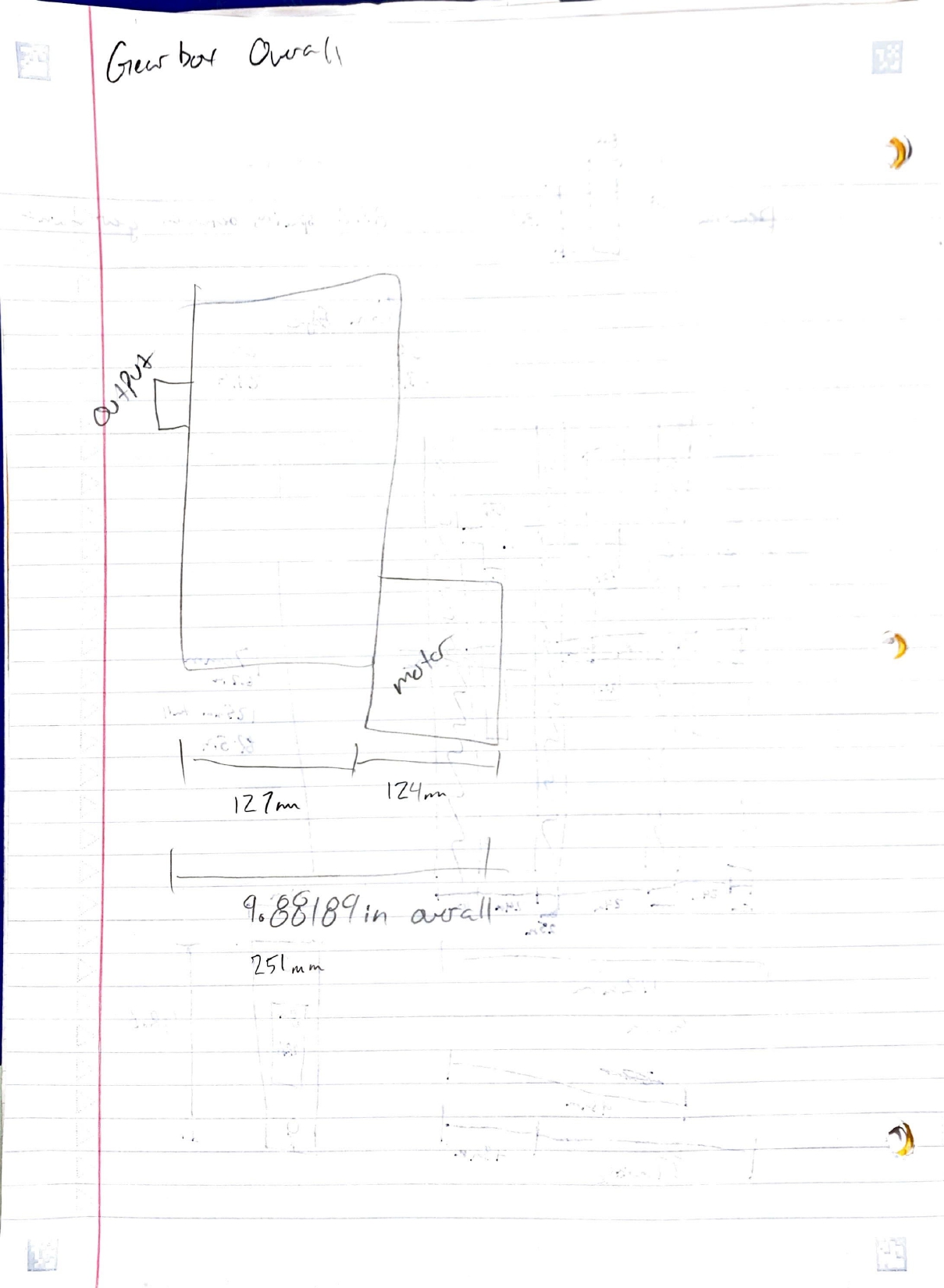
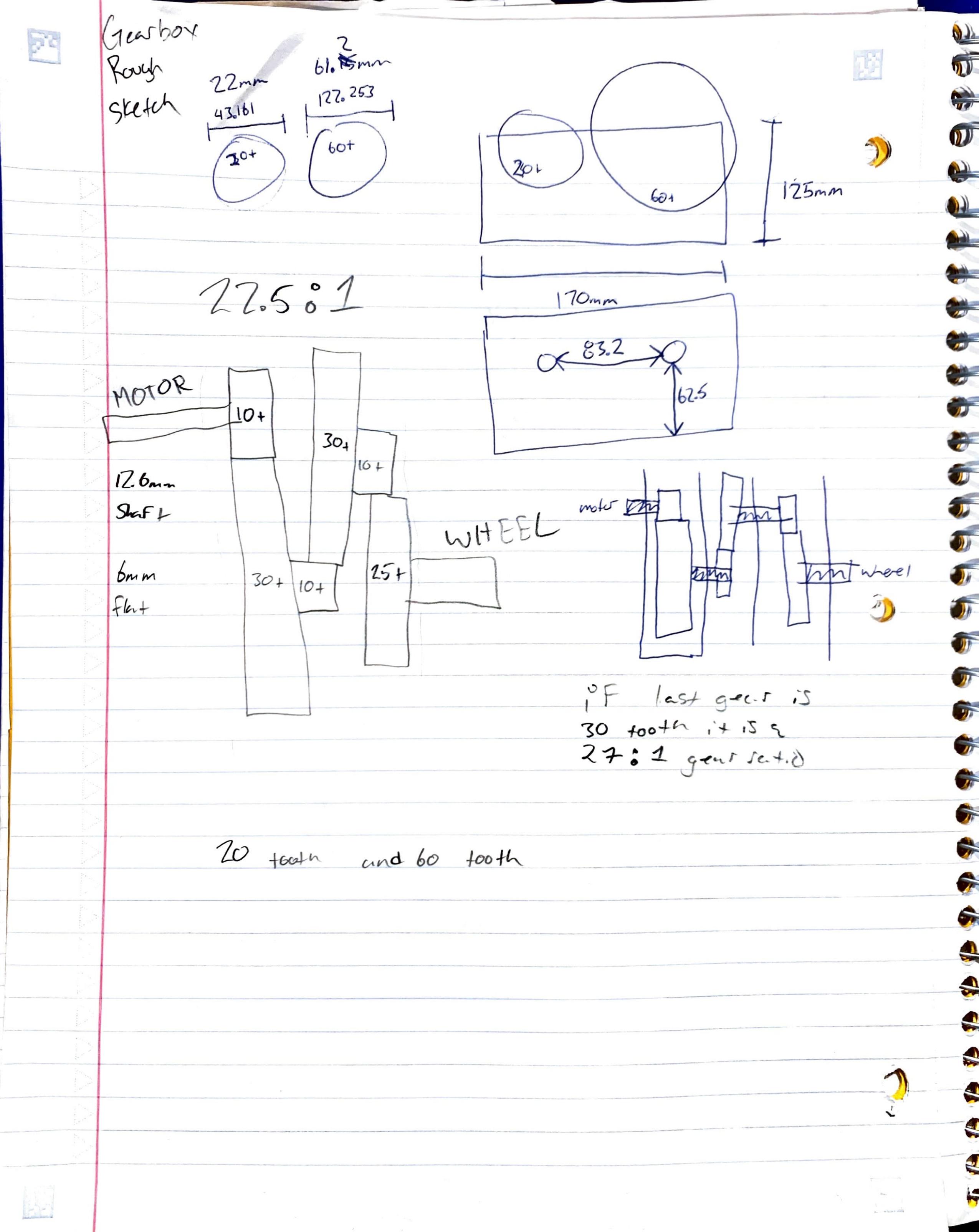
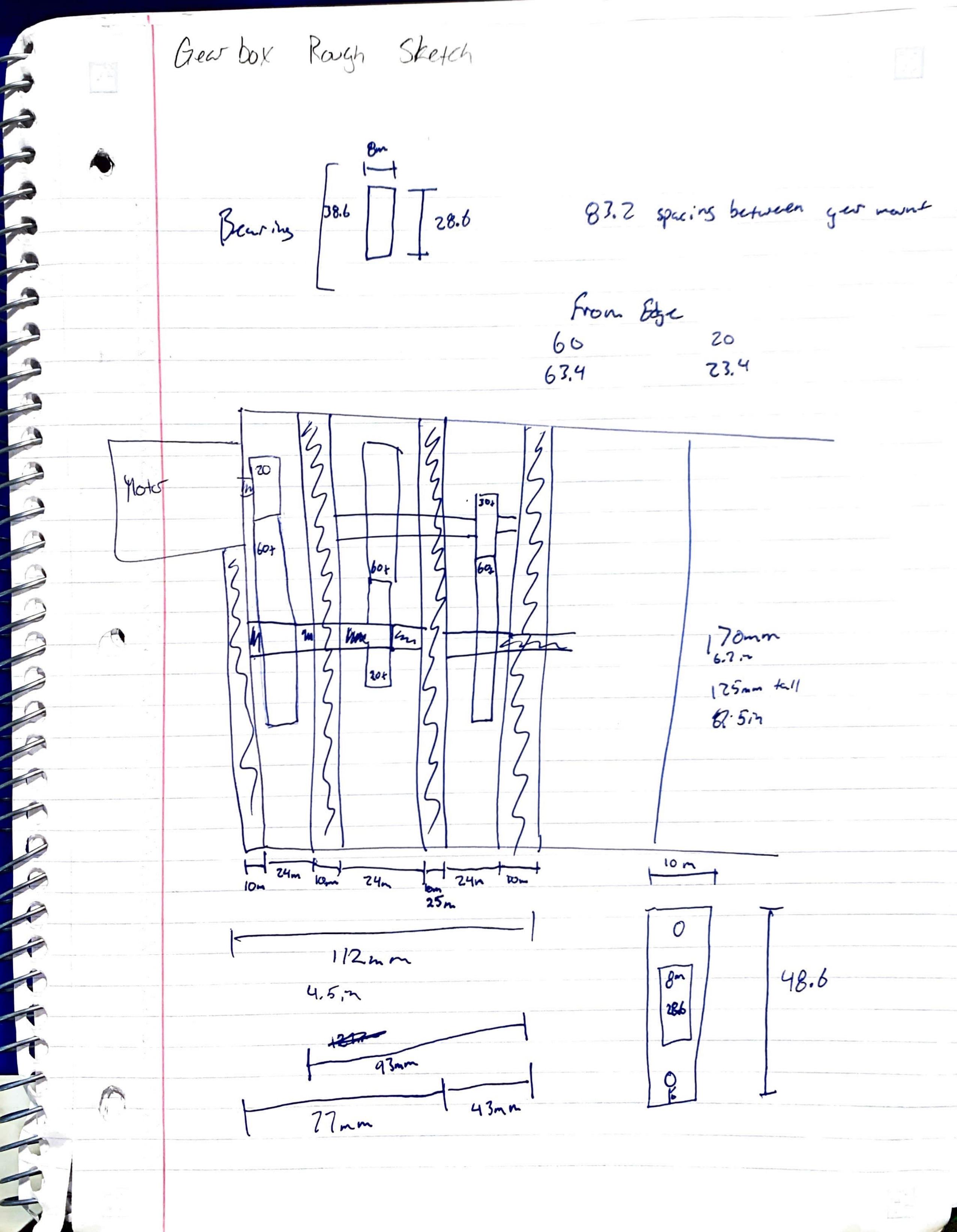
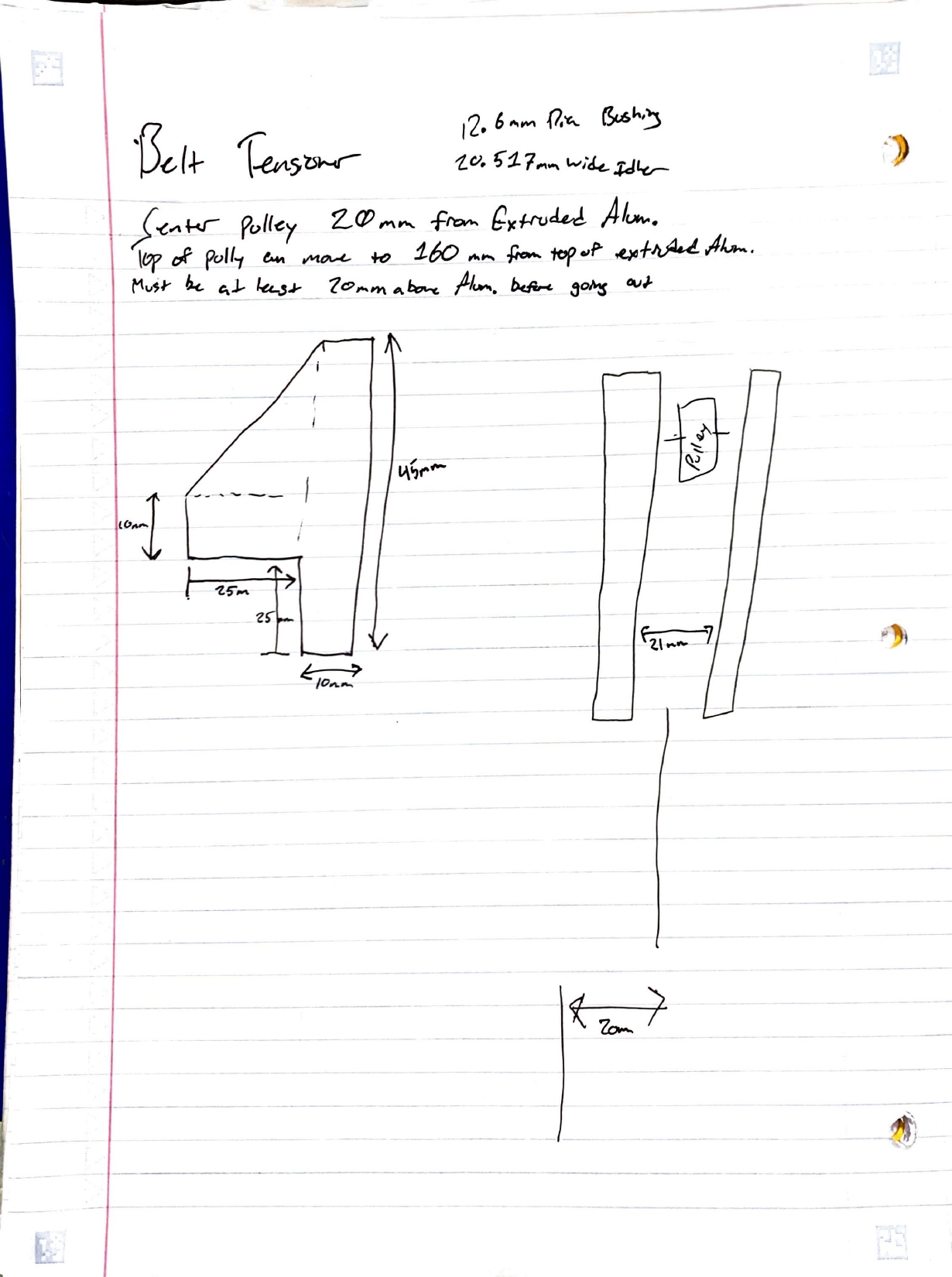
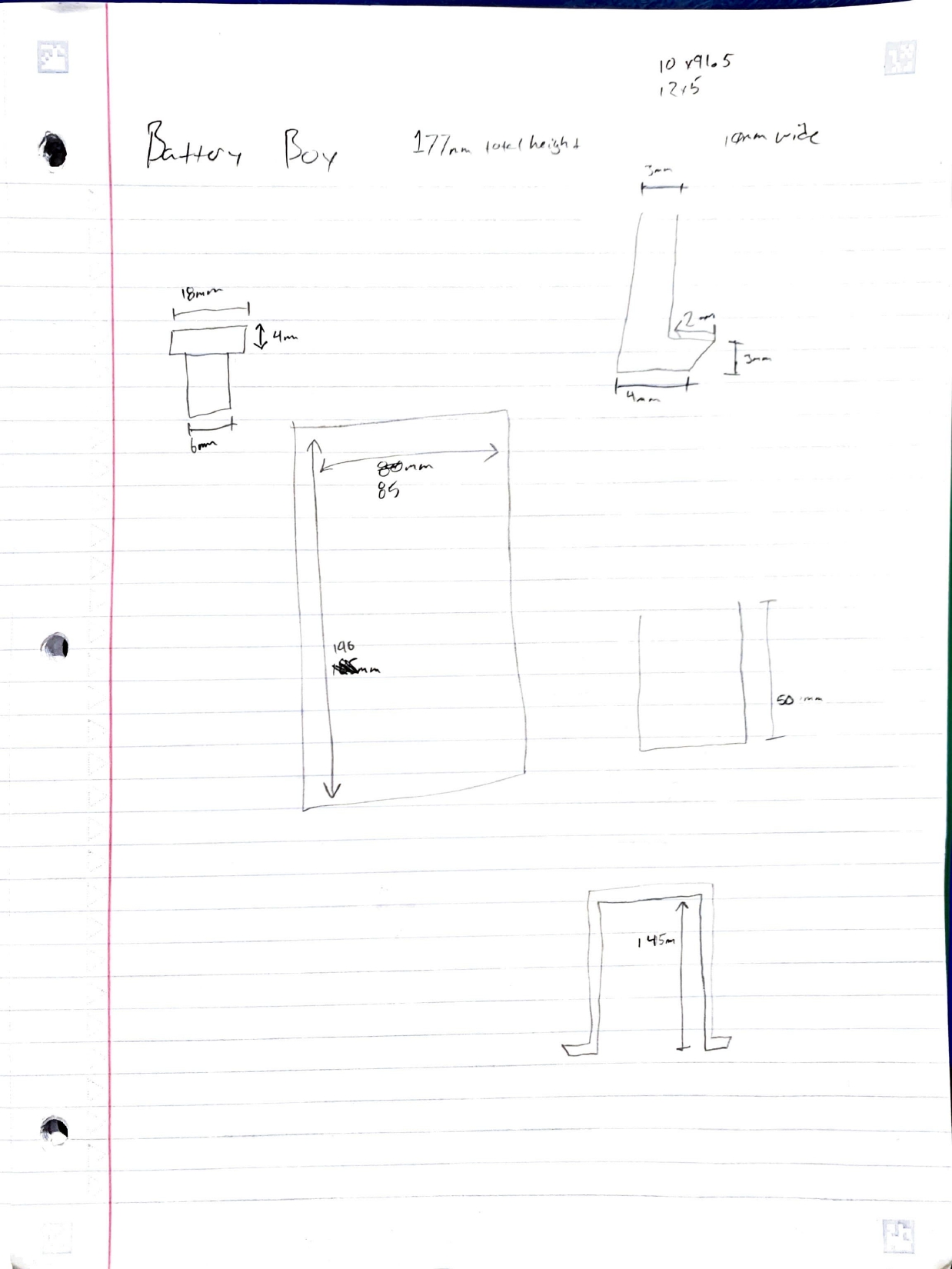
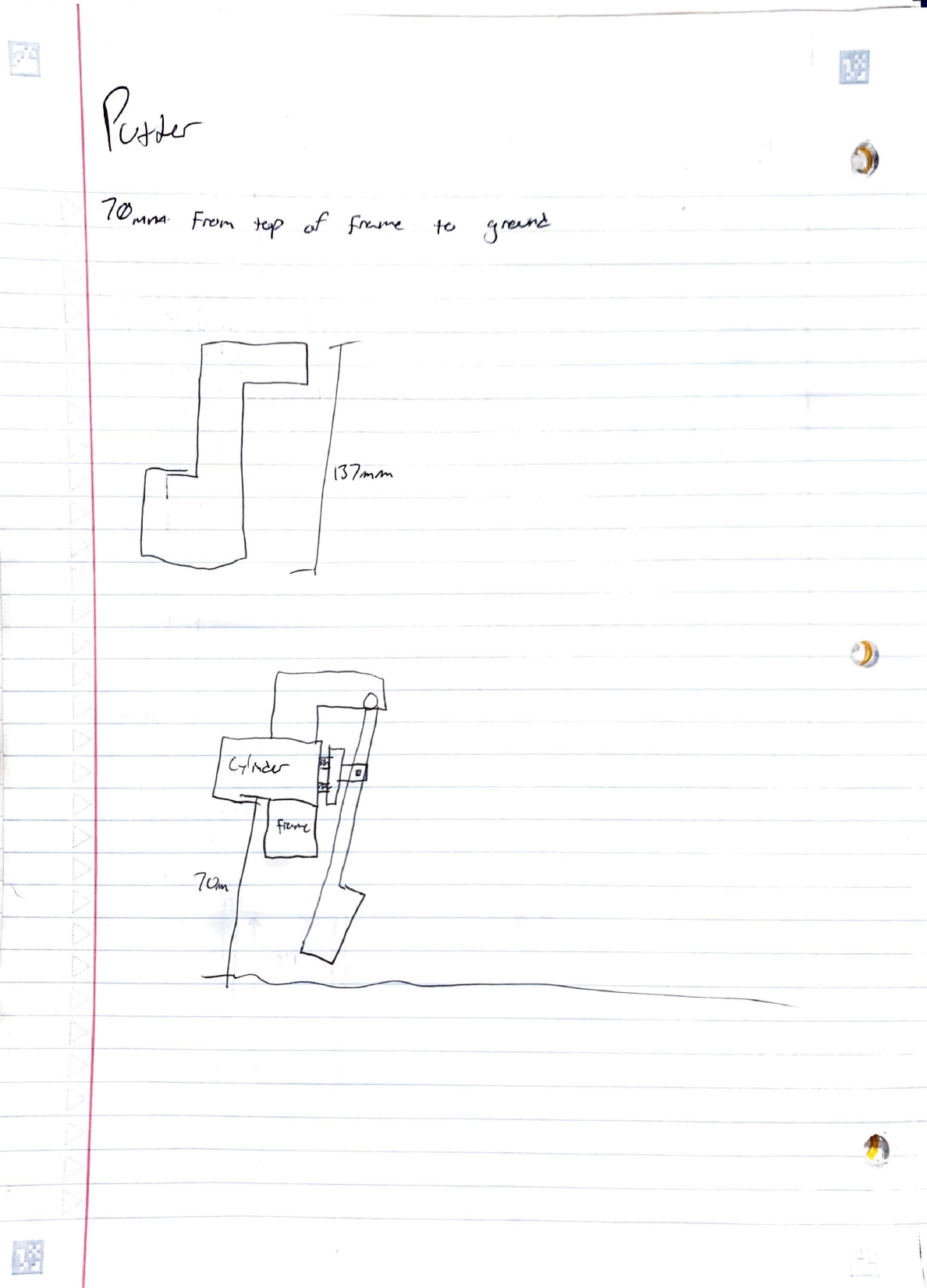
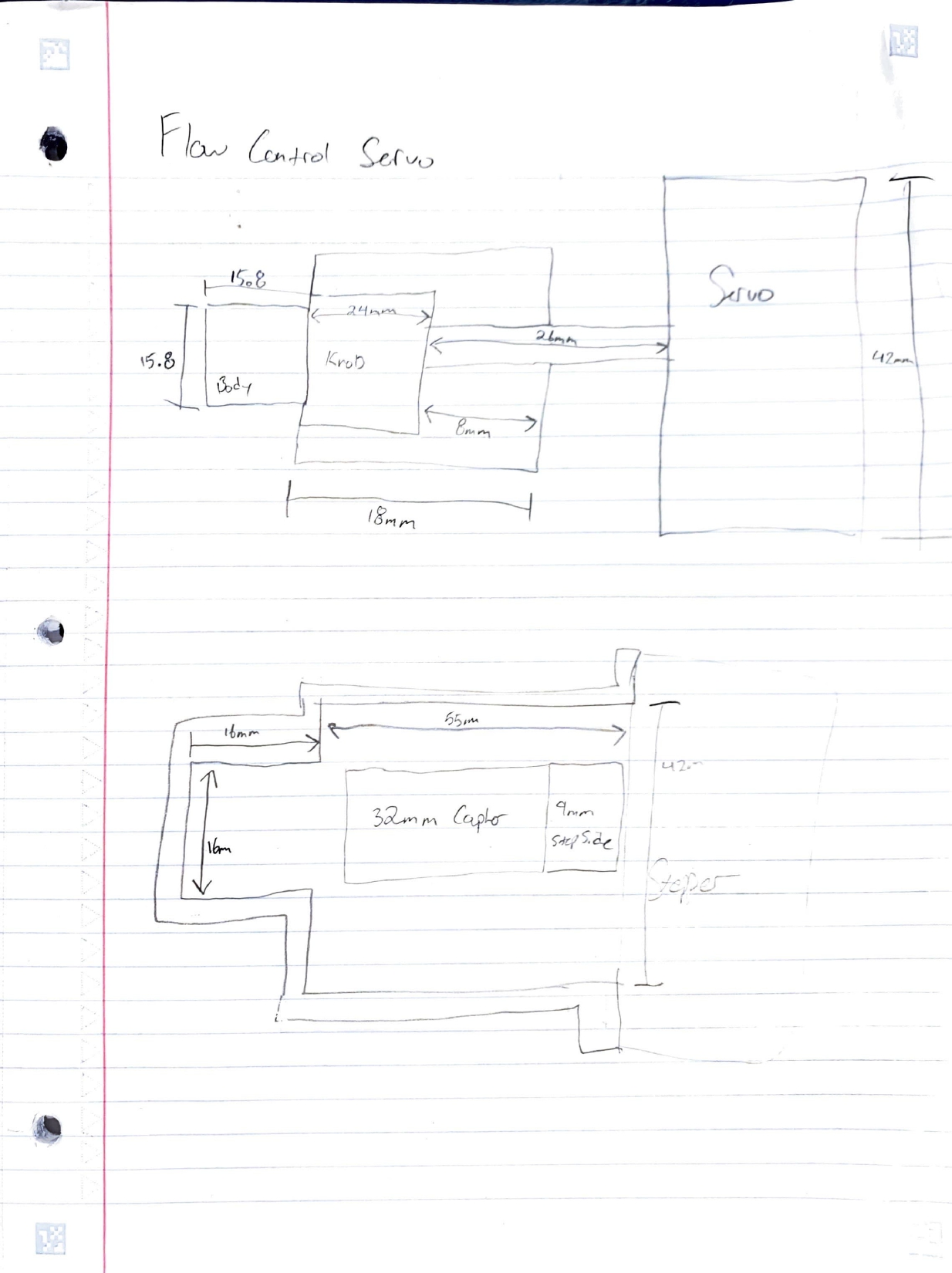
Below are several sketches that we did on paper to get a rough idea of our plans before modeling and better sketching.
/*
___ _ _ _ ___ _
/ (_)| | | | | | / (_) | | o o
| | | __ __ | | __ ,_ | | | __ __, | | _|_ __ _ _
| |/ / \_/ |/_) | | |_/ \_/ | |/_) | / \_/ | |/ | | | / \_/ |/ |
\___/|__/\__/ \___/| \_/ \/ \/ \__/ |_/| \_/ \___/\__/ \_/|_/|__/|_/|_/|_/\__/ | |_/
Current up to date code for the Clockwork Coalition Robot -- Last Updated April 23 2024
R1 : Catapult Toggle
R3 : Drive Both Motors With Left Stick
Right DPad : Toggle Ball Grip
L1 : Mini Golf Putter
Triangle : Air Compressors Toggle
Square + Up/Down : Vertical Lift Tower
Cross + Up/Down : Extra Stepper - Mos Likely For Spinning Nut
Circle + Up/Down : Putter Flow Control Stepper
Options : HuskyLens Auto Color Tracking
*/
#include
#include
#include "HUSKYLENS.h"
#include "Wire.h"
// Required for automated line following. HuskyLens is required to correctly pull data from the camera
HUSKYLENS huskylens;
HUSKYLENSResult result;
int linePosition = 0;
int leftwheelauto = 2000;
int rightwheelauto = 1000;
// Set Servo Names
Servo leftwheel;
Servo rightwheel;
// Relay Pins
int relay1 = 19;
int relay2 = 18;
int relay3 = 5;
int relay4 = 17;
int relay5 = 16;
int relay6 = 4;
int relay7 = 0;
int relay8 = 2;
// Stepper Pins
int Direction = 27;
int Move = 15;
int Enable1 = 25;
int Enable2 = 33;
int Enable3 = 32;
// Stick Positions
int leftstick;
int rightstick;
// Booleans - Used To Toggle Outputs On A Single Button Click
bool launcher; //Toggles basketball launcher cylinders
bool compressor; //Toggles compressor solenoids
bool ballgrip; //Toggles basketball gripper
bool gripper; //Toggles pick and place gripper
// Time Stuff - Used To Debounce Toggle Buttons
unsigned long lastmilli = 0;
unsigned long currentmilli = 0;
void setup() {
Serial.begin(115200);
// Connect to PS4 Controller
PS4.begin("A0:B7:65:4D:B5:88");
// Attach output pins for Servos
leftwheel.attach(12);
rightwheel.attach(14);
// Verify Connection To HuskyLens
Wire.begin();
Serial.println("w");
while (!huskylens.begin(Wire)) {
Serial.println(F("Begin failed!"));
delay(100);
}
// Write Color Recognition Algorithim To HuskyLens
huskylens.writeAlgorithm(ALGORITHM_COLOR_RECOGNITION);
// Set Outputs As Outputs
pinMode(relay1, OUTPUT);
pinMode(relay2, OUTPUT);
pinMode(relay3, OUTPUT);
pinMode(relay4, OUTPUT);
pinMode(relay5, OUTPUT);
pinMode(relay6, OUTPUT);
pinMode(relay7, OUTPUT);
pinMode(relay8, OUTPUT);
pinMode(Direction, OUTPUT);
pinMode(Move, OUTPUT);
pinMode(Enable1, OUTPUT);
pinMode(Enable2, OUTPUT);
pinMode(Enable3, OUTPUT);
// Set All Relays To High (Off)
digitalWrite(relay1, HIGH);
digitalWrite(relay2, HIGH);
digitalWrite(relay3, HIGH);
digitalWrite(relay4, HIGH);
digitalWrite(relay5, HIGH);
digitalWrite(relay6, HIGH);
digitalWrite(relay7, HIGH);
digitalWrite(relay8, HIGH);
}
void loop() {
// Check if PS4 Controller is connected. Stop All Movement If Not Connected
while (PS4.isConnected()) {
Serial.println(PS4.R2Value());
currentmilli = millis();
// Read Joystick Values, Map, And Write To Motor Controllers.
leftstick = PS4.LStickY();
rightstick = PS4.RStickY();
leftstick = map(leftstick, -127, 127, 1200, 1800);
rightstick = map(rightstick, -127, 127, 1800, 1200);
// Set motors to idle if joysticks are in the middle floating area
if (rightstick < 1575 && rightstick > 1425) {
rightstick = 1500;
}
if (leftstick < 1575 && leftstick > 1425) {
leftstick = 1500;
}
// Debugging Printout To Show Output Being Written To Motor Controllers
//Serial.print(leftstick);
//Serial.print("_____");
//Serial.println(rightstick);
// Output PWM Based On Stick Position
if (PS4.R3() == 1) {
leftwheel.writeMicroseconds(leftstick);
rightstick = map(leftstick, 1200, 1800, 1800, 1200);
rightwheel.writeMicroseconds(rightstick);
}
else {
leftwheel.writeMicroseconds(leftstick);
rightwheel.writeMicroseconds(rightstick);
}
// HuskyLens Line Follow Auto Mode
while (PS4.Options() == 1) {
// Grab Data From HuskyLens For Only Color ID 1
huskylens.request(1);
result = huskylens.read();
linePosition = result.xCenter;
// Print Where Color Block Center Is On Screen
//Serial.println(linePosition);
// Map values based off of R2
leftwheelauto = map(PS4.R2Value(), 0, 400, 1500, 1000);
rightwheelauto = map(PS4.R2Value(), 0, 400, 1500, 2000);
Serial.print(leftwheelauto);
Serial.print("____");
Serial.println(rightwheelauto);
// If Color Block Is On Left Third Of Screen, Turn Left
if (linePosition <= 131 && linePosition > 0) { // Was 106 and 0
Serial.println("Left");
leftwheel.writeMicroseconds(leftwheelauto); // Was 1500
rightwheel.writeMicroseconds(1500); //Was 1350
}
// If Color Block Is In Center Of Screen, Go Straight
else if (linePosition <= 187 && linePosition > 131) { //Was 187 and 106
Serial.println("Straight");
leftwheel.writeMicroseconds(leftwheelauto); // Was 1650
rightwheel.writeMicroseconds(rightwheelauto); // Was 1350
}
// If Color Block Is On Right Third Of Screen, Turn Right
else if (linePosition <= 320 && linePosition > 187) { //Was 320 and 212
Serial.println("Right");
leftwheel.writeMicroseconds(1500); // Was 1650
rightwheel.writeMicroseconds(rightwheelauto); // Was 1500
}
// If Color Is Not Found On Screen, Do Nothing
else {
Serial.println("Spin");
leftwheel.writeMicroseconds(1500);
rightwheel.writeMicroseconds(1500);
}
delay(100); // This delay is required to keep the HuskyLens from slowing down the line following.
}
// Putter Flow Control Stepper Movement
if (PS4.Circle() && PS4.Up()) {
digitalWrite(Enable1, LOW);
digitalWrite(Direction, LOW);
analogWrite(Move, 120);
Serial.println("Step 1 DirHi");
} else if (PS4.Circle() && PS4.Down()) {
digitalWrite(Enable1, LOW);
digitalWrite(Direction, HIGH);
analogWrite(Move, 120);
Serial.println("Step 1 DirLo");
} else {
digitalWrite(Enable1, HIGH);
}
// Nut Rotation Stepper
if (PS4.Cross() && PS4.Up()) {
digitalWrite(Enable2, LOW);
digitalWrite(Direction, HIGH);
analogWrite(Move, 130);
Serial.println("Step2 DirHI");
} else if (PS4.Cross() && PS4.Down()) {
digitalWrite(Enable2, LOW);
digitalWrite(Direction, LOW);
analogWrite(Move, 130);
Serial.println("Step2 DirLo");
} else {
digitalWrite(Enable2, HIGH);
}
// Vertical Lift Tower Stepper
if (PS4.Square() && PS4.Up()) {
digitalWrite(Enable3, LOW);
digitalWrite(Direction, HIGH);
analogWrite(Move, 130);
Serial.println("Step3 DirHi");
} else if (PS4.Square() && PS4.Down()) {
digitalWrite(Enable3, LOW);
digitalWrite(Direction, LOW);
analogWrite(Move, 130);
Serial.println("Step3 DirLo");
} else {
digitalWrite(Enable3, HIGH);
}
// If No Steppers Are In Use, Cease Writing PWM
if (!PS4.Circle() && !PS4.Cross() && !PS4.Square()) {
analogWrite(Move, 0);
}
// Compressor Toggle
if (PS4.Triangle() && currentmilli - lastmilli > 400) {
currentmilli = millis();
lastmilli = currentmilli;
if (compressor == 1) {
digitalWrite(relay6, HIGH);
compressor = 0;
}
else {
digitalWrite(relay6, LOW);
compressor = 1;
}
}
// Putter
if (PS4.L1()) {
digitalWrite(relay1, LOW);
} else {
digitalWrite(relay1, HIGH);
}
// Basketball Launcher Toggle
if (PS4.R1() && currentmilli - lastmilli > 400) {
currentmilli = millis();
lastmilli = currentmilli;
if (launcher == 1) {
digitalWrite(relay4, LOW);
digitalWrite(relay7, LOW);
launcher = 0;
}
else {
digitalWrite(relay4, HIGH);
digitalWrite(relay7, HIGH);
launcher = 1;
}
}
// Basketball Gripper Toggle
if (PS4.Right() == 1 && currentmilli - lastmilli > 400) {
currentmilli = millis();
lastmilli = currentmilli;
if (ballgrip == 1) {
digitalWrite(relay5, LOW);
ballgrip = 0;
}
else {
digitalWrite(relay5, HIGH);
ballgrip = 1;
}
}
// Pick And Place Gripper Toggle
if (PS4.Left() && currentmilli - lastmilli > 400) {
currentmilli = millis();
lastmilli = currentmilli;
if (gripper == 1) {
digitalWrite(relay3, LOW);
gripper = 0;
}
else {
digitalWrite(relay3, HIGH);
gripper = 1;
}
}
}
// If PS4 Controller Is Not Connected Set Motors To Neutral.
// This helps avoid Mustang Syndrome
while (!PS4.isConnected()) {
leftstick = 1500;
rightstick = 1500;
leftwheel.writeMicroseconds(leftstick);
rightwheel.writeMicroseconds(rightstick);
digitalWrite(Enable1, HIGH);
digitalWrite(Enable2, HIGH);
digitalWrite(Enable3, HIGH);
analogWrite(Move, 0);
Serial.println("MY LEEGGGGGG!!!!!");
}
}